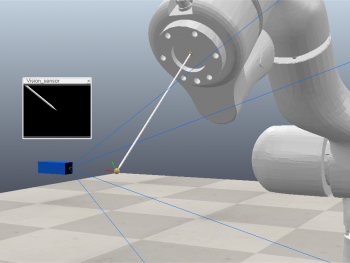
黄凯 黄凯,中山大学计算机学院计算机技术专业,硕士研究生。研究方向:串联机器人运动学参数修正。 教育背景 硕士,计算机技术,中山大学,2022.09 – 2025.06学士,信息工程,华南理工大学,2018.09 – 2022.06 科研项目 基于强化学习的串联机器人运动学参数校正方法 仿真实验 Robot in Simulation Environment (CoppeliaSim) Simulation Experiment of Kinematic Calibration 实机实验 Real-world Robot Calibration Platform(ROKAE xMate ER) Real-world Experiment of Kinematic Calibration 学术成果 学术论文: [1] K. Huang, H. Liang, J. Xia, T. Hong, M. Cui, and K. Huang, “Kinematic Parameter Calibration for Serial Robots Based on Remote Center of Motion and Reinforcement Learning.” (IEEE ROBIO 2024) 发明专利: [1] 黄凯,黄凯,梁宏立,夏俊,“一种基于远程运动中心与强化学习的串联机器人DH运动学参数修正方法及其系统”,公布日期:2024-05-07(公布;实质审查阶段) 荣誉奖项 [1] 华南理工大学一等奖学金[2] 华南理工大学二等奖学金[3] 华南理工大学本科优秀毕业设计[4] 中山大学研究生一等奖学金[5] 中山大学研究生二等奖学金[6] 2019 年全国大学生数学建模竞赛广东省分赛三等奖[7] 2020 年广东省大学生电子设计竞赛”5G-AI”专题二等奖[9] 2022 年微创机器人大迈杯极客创新大赛二等奖