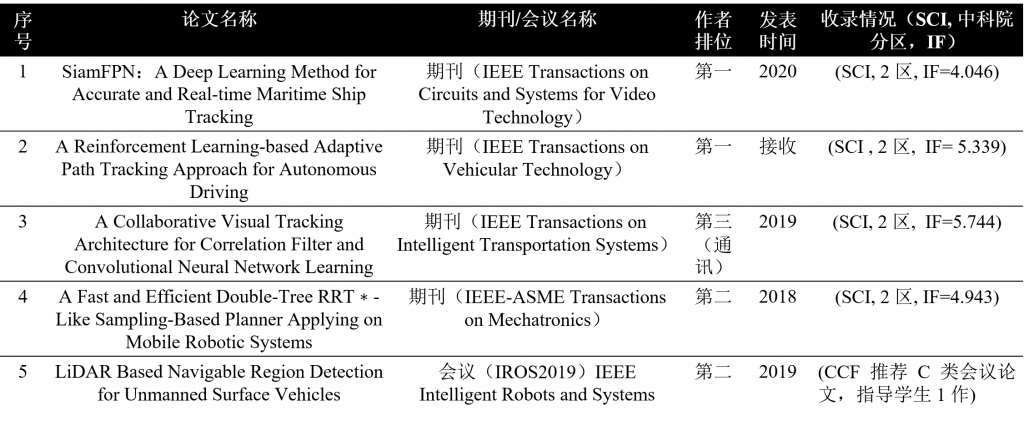
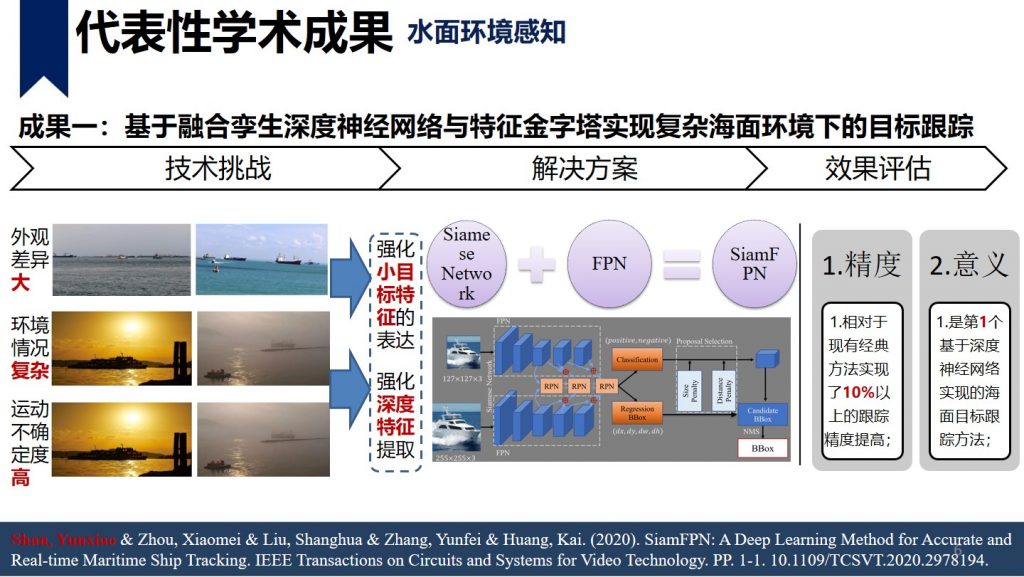
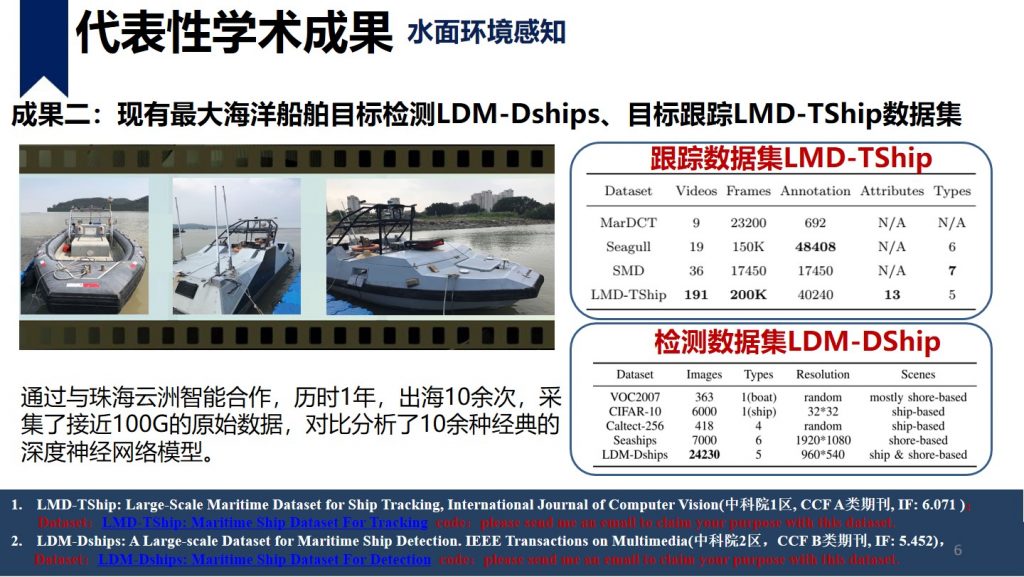
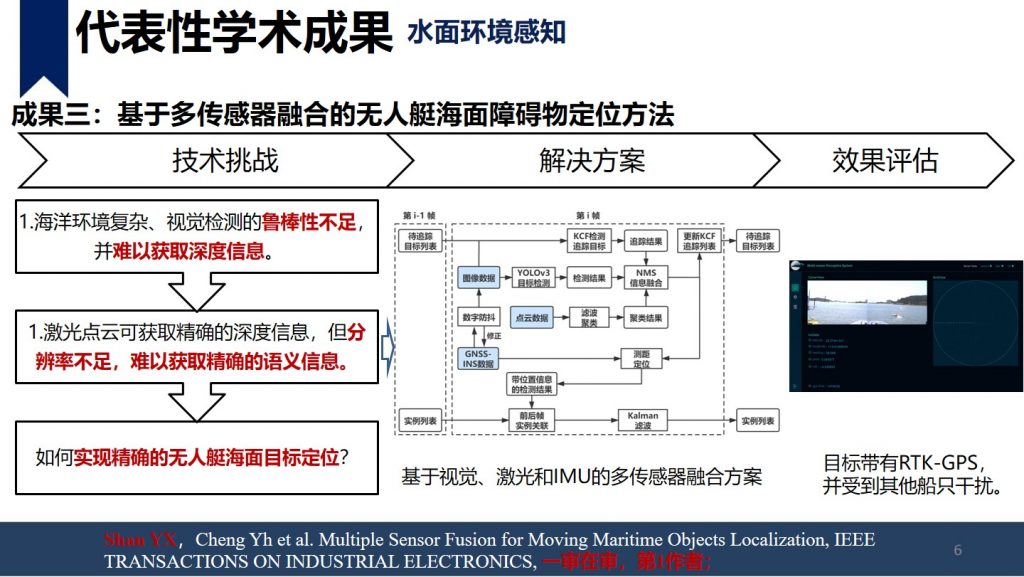
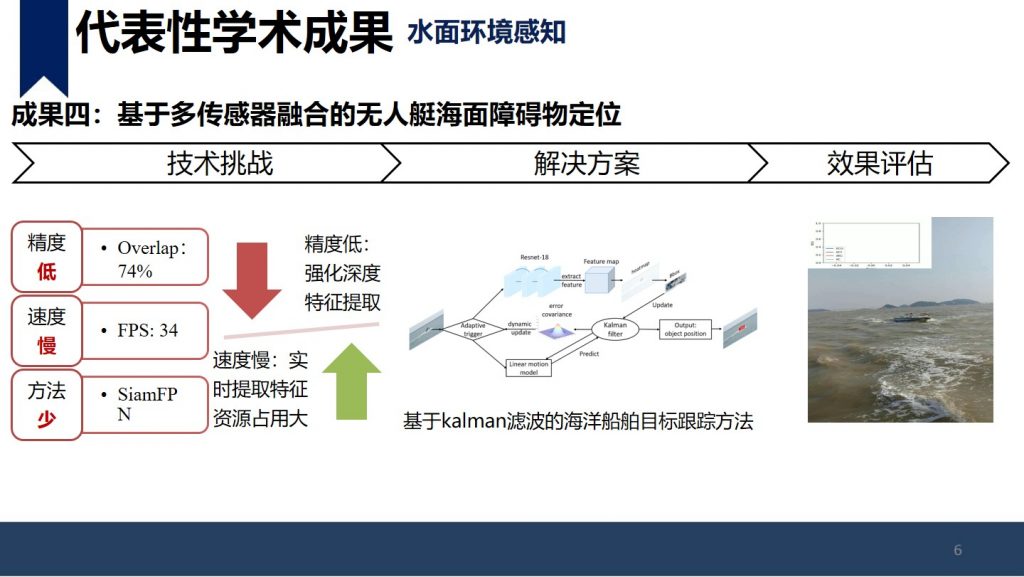
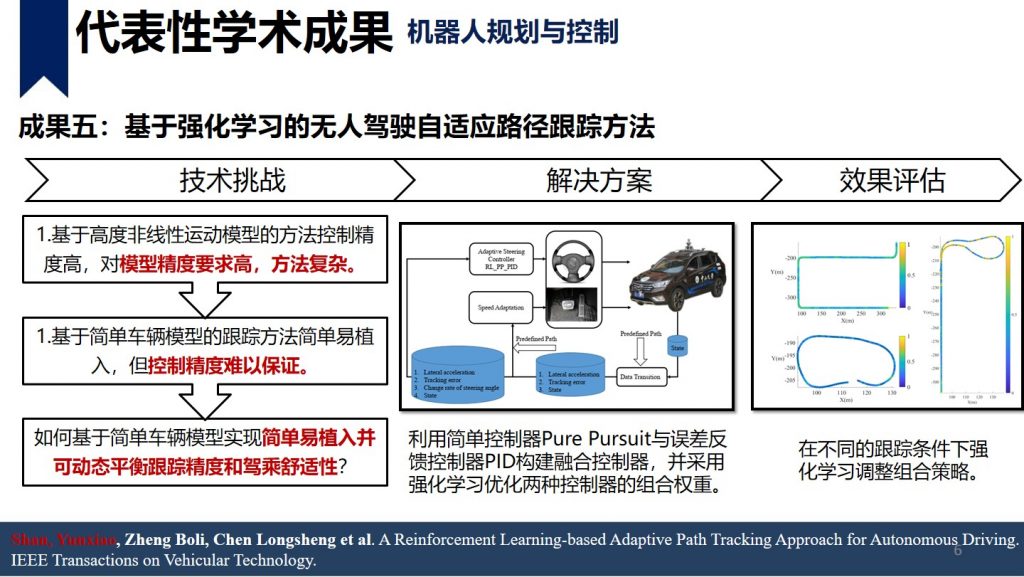
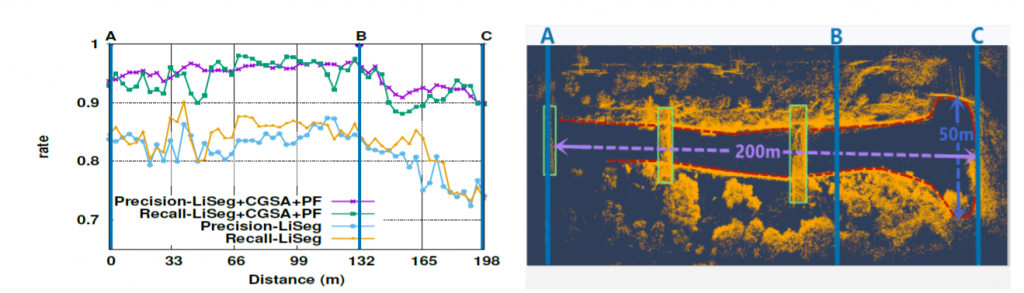
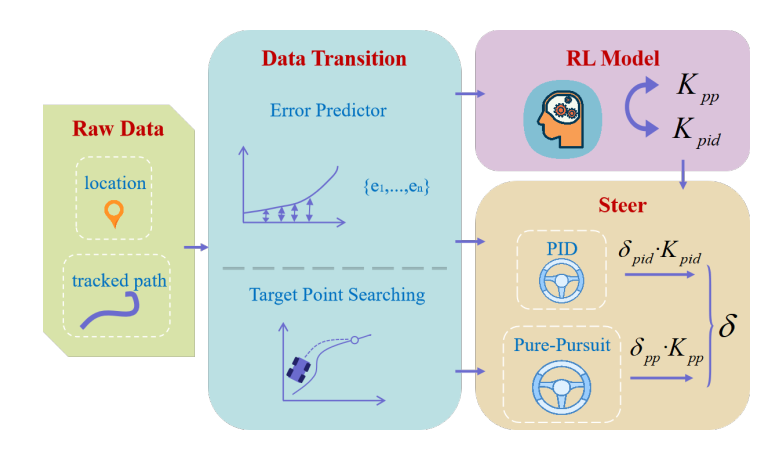
单云霄,美国罗格斯大学-武汉大学博士,中山大学人工智能学院副教授,第二届中国无人船公开赛评审专家,负责中山大学无人艇相关技术研究工作,专注于无人系统的规划控制技术以及基于单/多水面机器人的水面目标探测和跟踪、水面可通行区域提取等研究领域。目前项目组经费充足,欢迎对机器人算法、嵌入式、硬件系统等感兴趣的同学与我联系。本人比较push,喜欢勤奋真心愿意做事的小伙伴加入团队。 单云霄 副教授shanyx@mail.sysu.edu.cn个人主页 学术成就:博士研究主要专注于无人驾驶的规划与控制技术,博后的研究拓展到水面航行机器人、移动机器人等平台的感知、规划以及控制技术。在机器人的感知、规划、控制方向进行了深入的研究工作,在 ITS, TCVST, TVT等国际著名期刊发表学术论文 17篇, SCI 检索 6 篇(中科院 2 区以上论文 4 篇), EI 检索 11 篇(第一作者 4 篇),申请专利 10 件(第一发明人 4 件,授权 1 件)。 代表性学术成果: 主持参与科研项目: 1.基于智能海防多源感知互联预警的关键技术研究(深圳市科创委),200万,排名第二,2019-2021;2.高海况下远海多无人船自主循迹与协同关键技术研究及产业化应用示范(广东省重点研发),500万,项目编号:2018B010108004,中山大学子课题负责人,2019-2021;3.面向多场景的高精度全转向大载荷移动操作一体化机器人开发与应用示范(广东省重点研发),1000万,项目编号:2019B090919003,中山大学子课题负责人,2019-2021;4.基于视觉的机器人环境建模与定位导航(科技部重点研发),1000万,课题编号:2018YFB1305005,骨干成员,2019-2021; 1.基于深度学习的水面目标检测与跟踪 当前研究成果:开发了SiamFPN RPN算法,实现了高海况条件下目标跟踪效果相对于传统方法10%以上的精度提高。 跟踪模型准确率召回率F值KCF(2014)64.88%64.88%64.88%ECO(2016)65.09%65.09%65.09%SiamRPN(2017)58.04%57.39%57.71%SiamVGG(2018)56.27%55.88%56.07%SiamFPN RPN73.7%73.67%73.69% 未来研究方向:1.基于深度神经网络的多传感器融合的水面目标检测跟踪方法(包括但不限于:可见光、红外、激光雷达、毫米波雷达)2.基于多机器人系统的多水面目标的检测与跟踪方法 2.水面激光类的应用算法研究 当前研究成果:利用轻量化神经网络实现河岸目标分类,同时利用粒子滤波和凸多边形实现目标水面可行驶区域的提取。 未来研究方向: 1.利用激光雷达实现3Dslam定位,解决高动态水面对SLAM技术的影响,实现无人船在弱GPS情况下的自主定位。 2.利用激光雷达实现水面物体的准确感知,针对水面物体摆动大,外观差异大的特点,利用激光雷达或与其他传感器融合准确实现对水面物体的3D建模、定位、跟踪。 3.机器人的运动规划与控制技术 主要专注于无人驾驶汽车的规划与控制技术,目前在研的三个主要方向是考虑不确定性的运动规划技术、数据驱动规划方法以及端到端的转向控制方法研究。其中不确定的运动规划技术研究方向欢迎有数学背景或对优化控制感兴趣的小伙伴与我联系。 控制技术方向主要专注于基于强化学习的路径跟踪控制以及自适应跟踪控制方法。